A summary of techniques and state-of-art tools for different use cases
Diving into distributed training is a complex adventure at first. There’s a maze of tool guides and options out there that can leave data scientists without a clear roadmap. Even many articles don’t give you the big picture you need to start. But don’t be discouraged! The challenges are worth it. As we explore the benefits of distributed training in this article, remember that even experts were once newcomers.
We will go through why it is needed, what common strategies and implementations depend on your use case, and finish with the top-of-the-line but more complex approaches. Let’s make this journey less intimidating and discover what it offers!
Why Distributed Training?
When training big models or handling large datasets, more than relying on a single machine might be required, leading to slow training processes. This is where distributed training comes to the rescue. There are several incentives for teams to transition from single-node to distributed training. Some common reasons include:
Faster experimentation
In research and development, time is of the essence. Teams often need to accelerate the training process to obtain experimental results quickly. Employing multi-node training techniques, such as data parallelism, helps distribute the workload and leverage the collective processing power of multiple nodes, leading to faster training times.
Large batch sizes
Data parallelism becomes crucial when the batch size required by your model is too large to fit on a single machine, called a node. It involves duplicating the model across multiple GPUs, with each GPU simultaneously processing a subset of the data.
Large models
In scenarios where the model itself is too large to fit on a single machine’s memory, model parallelism is utilized. This approach involves splitting the model across multiple GPUs in various ways, with each GPU responsible for computing a portion of the model’s operations. By dividing the model’s parameters and computations, model parallelism enables training that was impossible before (e.g., training GPT-4) on machines with limited memory capacity.
Depending on your use case and technical setting, you will need to choose between different strategies, which will start your distributed training journey. This article will discuss some common SotA strategies and evaluate which scenarios you might want to consider.
Parallelism Strategies
There are different parallelism strategies, each relevant to different use cases. Each approach has its own advantages and is suitable for different scenarios. You can either 1) distribute the training data across multiple nodes or GPUs or 2) divide the model itself in various ways across multiple nodes or GPUs.
The first approach is particularly useful when the batch size used by your model is too large to fit on a single machine or when you aim to speed up the training process. The second strategy becomes handy in training a big model on machines with limited memory capacity. Furthermore, both strategies can be combined to distribute data across multiple model instances, with each instance running on multiple nodes or GPUs.
Side note: Parallelism techniques are still an active research topic in the field, continuously growing with each new technique and library for implementation purposes. In this article, we will cover some of the most common libraries and techniques in the current implementation space. Please feel free to reach out to me if you want to see different approaches and libraries in the upcoming articles.
Data parallelism
In data parallelism, you make copies of the model and distribute them to different processes or machines. It involves duplicating the model across multiple GPUs, where each GPU processes a subset of the data simultaneously. Once done, the results of the models are combined, and training continues as normal. This approach is particularly useful when the batch size used by your model is too large to fit on a single machine or when you aim to speed up the training process.
Implementations
- Pytorch Data Parallel (DP): This implementation in PyTorch allows you to distribute the data across multiple GPUs on a single machine. It replicas the model in every forward pass and simplifies the process of utilizing multiple GPUs for training.
- Pytorch Distributed Data Parallel (DDP): DDP enables training models across multiple processes or machines. It handles the communication and synchronization between different replicas of the model, making it suitable for distributed training scenarios. It uses ‘multi-process parallelism, and hence there is no GIL contention across model replicas.’
- Tensorflow MirroredStrategy: MirroredStrategy is a TensorFlow API that supports data parallelism on a single machine with multiple GPUs. It replicates the model on each GPU, performs parallel computations, and keeps the model replicas synchronized.
- Tensorflow MultiWorkerMirroredStrategy: This TensorFlow strategy extends MirroredStrategy to distribute training across multiple machines. It allows for synchronous training across multiple workers, where each worker can access one or more GPUs.
- Tensorflow TPUStrategy: TPUStrategy is designed specifically for training models on Google’s Tensor Processing Units (TPUs). It replicates the model on multiple TPUs and enables efficient parallel computations for accelerated training.
Side note: While DataParallel (DP) and DistributedDataParallel (DDP) are available in Pytorch, it is recommended to use DDP for its superior performance, as stated in the official PyTorch documentation. For a detailed overview of both settings, you can refer to the Pytorch documentation.
When to consider data parallelism
- Your model fits in a single GPU, but you want to experiment faster.
- Your model fits in a single GPU, but you want to experiment with bigger batch sizes.
Pipeline parallelism
Scaling up the capacity of deep neural networks has proven to be an effective method for improving the quality of models in different machine learning tasks. However, in many cases, when we want to go beyond the memory limitations of a single accelerator, it becomes necessary to develop specialized algorithms or infrastructure. Here comes pipeline parallelism.
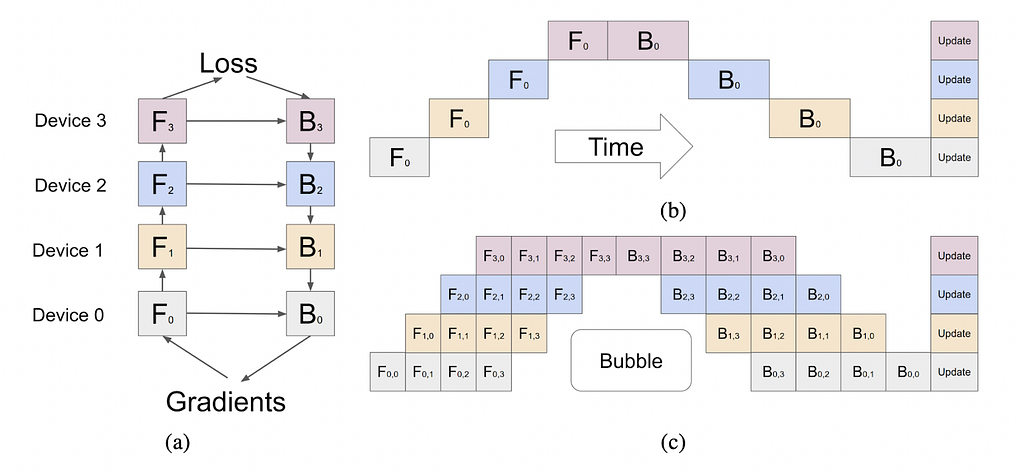
Pipeline parallelism is a method where each layer (or multiple layers) is placed on each GPU (vertically or layer-level). If applied naively, the training process will suffer from severely low GPU utilization, as shown in Figure 1(b). The figure shows a model of four layers spread across four different GPUs (vertically). The horizontal axis represents the training process over time, demonstrating that only one GPU is used. For more information about pipeline parallelism, refer to this paper.
Implementations
- Pytorch RPC-Based Distributed Training (RPC): RPC is another approach to distributed training that supports more complex training scenarios. It’s useful when the training task doesn’t fit the traditional data-parallel training used in DDP. RPC helps coordinate and manage communication between different processes or machines involved in the training. It allows for more advanced training methods that require collaboration and coordination among different parts of the training process.
- Fairscale: A Pytorch extension library by Meta for high-performance and large-scale training with SoTA techniques.
- Deepspeed: A deep learning optimization library by Microsoft that ‘makes distributed training and inference easy, efficient, and effective.’
- Megatron-LM: only internal implementation is available
- Mesh Tensorflow: implemented as a layer over TensorFlow.
Side Note: It is required to use Pytorch to leverage Deepspeed and Fairscale.
When to consider pipeline parallelism
- You have a sequential model with many layers (e.g., neural networks, transformers), which does not fit into the memory of a single machine.
Parameter server paradigm
In large-scale machine learning scenarios, the parameter server paradigm can be used. The parameter server is responsible for storing and managing the model parameters, such as large embedding tables, while workers perform computations on subsets of the data. After the computation is done, each worker interacts with parameter servers to obtain the latest parameter updates.
These trainers execute their training loops locally and synchronize independently with the parameter server to fetch the most recent parameters. For more information about the parameter server paradigm, refer to this paper.
Implementations
- Pytorch RPC-Based Distributed Training (RPC): RPC facilitates communication between the workers and the parameter server, enabling efficient synchronization of the model parameters during training.
- Tensorflow ParameterServerStrategy: In TensorFlow 2, pParameterServerStrategy distributes the training steps to a cluster that scales up to thousands of workers (accompanied by parameter servers). This configuration is known as asynchronous training.
When to consider parameter server
- You have a federated learning use case
- You want to train your model with multiple workers asynchronously using spot instances. In this case, if some workers experience failures, it does not hinder the cluster from carrying out its tasks. This enables the cluster to train using instances that may occasionally become unavailable, such as preemptible or spot instances.
Tensor parallelism
Tensor parallelism is a technique that involves dividing the model horizontally. It assigns each chunk of the tensor to a designated GPU. Each GPU independently works on its assigned chunk during processing, allowing for parallel computation across multiple GPUs. This approach is often called horizontal parallelism, as the splitting of the tensor occurs at a horizontal level.
The results from each GPU are then synchronized at the end of the computation step, combining the individual outputs to form the final result. Tensor parallelism enables the efficient utilization of multiple GPUs and can significantly accelerate the processing of large tensors in deep learning and scientific computing tasks.
Implementations
- Pytorch Tensor Parallel: Tensor Parallelism(TP) is built on top of DistributedTensor(DTensor) and provides several Parallelism styles: Rowwise, Colwise, and Pairwise Parallelism.
- DeepSpeed Tensor Parallelism for Inference of HuggingFace Models
- Megatron-LM: only internal implementation is available
Special considerations from HuggingFace documentation: Tensor Parallelism (TP) requires a very fast network; therefore, it’s not advisable to do TP across more than one node. Practically, if a node has four GPUs, the highest TP degree is, therefore, 4. If you need a TP degree of 8, you must use nodes with at least eight GPUs.
Combination of Parallelism Techniques
Sometimes, a data science task may require a combination of different training paradigms to achieve optimal performance. For instance, you can leverage two or more methods we covered earlier to take advantage of their strengths. There are many possible combinations of these techniques. However, we will cover only two in this section, which are state-of-the-art. If you want to train a gigantic model with billions of parameters, consider one of these techniques:
The Zero Redundancy Optimizer (ZeRO)
ZeRO (Zero Redundancy Optimizer) is a memory optimization technology for large-scale distributed deep learning that greatly reduces the resources needed for model and data parallelism while enabling the training of models with billions to trillions of parameters. It eliminates memory redundancies by partitioning the model states, including parameters, gradients, and optimizer states, across data-parallel processes instead of replicating them.
ZeRO consists of three main optimization stages: Optimizer State Partitioning (Pos or Stage 1), Add Gradient Partitioning (Pos+g or Stage 2), and Add Parameter Partitioning (Pos+g+p or Stage 3). Each stage progressively reduces memory requirements while maintaining similar communication volumes as data parallelism. For more information about ZeRO, please refer to this paper. Or have a look at the video here.
Implementations
- Pytorch: Stage 1 is implemented as ZeRO-1. Further stages are being implemented.
- Fairscale: All three stages are implemented.
- DeepSpeed: All three stages are implemented. Using ZeRO in a DeepSpeed model is quick and easy because you only need to change a few configurations in the DeepSpeed configuration JSON. No code changes are needed.
Fully sharded data parallel
Fully Sharded Data Parallel (FSDP) by the FairScale team at Meta is essentially a mix of tensor parallelism and data parallelism that aims to accelerate the training of large models by sharding the model’s parameters, gradients, and optimizer states across data-parallel workers. Unlike traditional data parallelism, where each GPU holds a copy of the entire model, FSDP distributes these components among the workers.
This distribution allows for more efficient use of computing resources and enables training with larger batch sizes and models. Additionally, FSDP allows offloading the sharded model parameters to CPUs when they are not actively involved in computations. By utilizing FSDP, researchers and developers can scale and optimize the training of their models with simple APIs, enabling more efficient training of extremely large models. For more information and implementation on Pytorch, please refer to this blog.
Implementations
- Pytorch: In the next releases, Pytorch plans to make it easy to switch between DDP, ZeRO1, ZeRO2, and FSDP flavors of data parallelism in the new API. To further improve FSDP performance, memory fragmentation reduction, and communication efficiency improvements are also planned.
- Fairscale: The version of FSDP on their GitHub repository is for historical references and for experimenting with new ideas in research of scaling techniques.
Alpa: Automating interoperator and intraoperator parallelism for distributed deep learning
Alpa is a framework that automates the complex process of parallelizing deep learning models for distributed training. It focuses on two types of parallelism: inter-operator parallelism (e.g., device placement, pipeline parallelism, and their variants) and intraoperator parallelism (e.g., data parallelism, Megatron-LM’s tensor model parallelism).
Interoperator parallelism assigns different operators in the model to different devices, reducing communication bandwidth requirements but suffering from device underutilization. Intraoperator parallelism partitions individual operators and executes them on multiple devices, requiring heavier communication but avoiding data dependency issues.
Alpa uses a compiler-based approach to automatically analyze the computational graph and device cluster, finding optimal parallelization strategies for interoperator and intraoperator parallelism. It generates a static plan for execution, allowing the distributed model to be efficiently trained on a user-provided device cluster.
Traditional parallelism methods, such as device placement and pipeline parallelism, require manual design and optimization for specific models and compute clusters. Alpa simplifies this process by automatically determining the best parallelization plan for a given model, making it easier for ML researchers to scale up their models without extensive expertise in system optimization.
It achieves this by leveraging heterogeneous mapping and conducting passes to slice the computational graph, partition tensors, and formulate an Integer-Linear Programming problem to optimize intraoperator parallelism. The interoperator pass minimizes execution latency using a Dynamic Programming algorithm. Finally, the runtime orchestration generates execution instructions for each device submesh, allowing for efficient distributed computation. For more information, please refer to the documentation.
Implementations
- Alpa: Built on top of the tensor computation framework Jax. Alpa can automatically parallelize Jax functions and run them on a distributed cluster. Alpa analyzes the computational graph and generates a distributed execution plan tailored for the computational graph and target cluster. The generated execution plan can combine state-of-the-art distributed training techniques, including data parallelism, operator parallelism, and pipeline parallelism. The framework’s code is also available as open-source. For more information about the strategy, please refer to this blog post and this presentation too.
Side note: The combined strategies are SoTA approaches, which need further investigation for various use cases. At the time of writing this blog, there has not been much comparison material available, possibly due to the high costs of training such models and new approaches.
Conclusion
And there you have it, the grand finale of our expedition into the world of distributed training. Distributed training is a powerful solution for handling large datasets and training big models. It offers several advantages, such as faster experimentation, the ability to work with large batch sizes, and the opportunity to train models too large to fit in a single machine’s memory. You can choose from different parallelism strategies depending on your specific use case.
The field of parallelism techniques is still evolving, with new techniques and libraries being developed. While we have covered some of the most common and current state-of-the-art strategies in this article, other approaches and libraries may be worth exploring. The choice of parallelism technique depends on your specific use case, technical setting, and available resources. As you embark on your distributed training journey, regardless of your use case, may the GPU force be with you!
Want to Connect?
So if you're looking for someone to geek about data science and
pesky infrastructural bottlenecks, ping me on LinkedIn or on Discord.
Let's nerd out together over our love for data, GPUs, and all things AI.
References and Further Reads
[1] GPipe: Efficient Training of Giant Neural Networks using Pipeline Parallelism
[2] Pytorch documentation about Pipeline Parallelism
[3] Implementing a Parameter Server Using Distributed RPC Framework
[4] Scaling Distributed Machine Learning with the Parameter Server
[5] Tensor Parallelism in Pytorch
[6] Fully Sharded Data Parallel: faster AI training with fewer GPUs
[7] Model Parallelism by HuggingFace
[8] Efficient Large-Scale Language Model Training on GPU Clusters Using Megatron-LM
[9] Fit More and Train Faster With ZeRO via DeepSpeed and FairScale
[10] ZeRO and DeepSpeed: New system optimizations enable training models with over 100 billion parameters
Parallelism Strategies for Distributed Training was originally published in Better Programming on Medium, where people are continuing the conversation by highlighting and responding to this story.